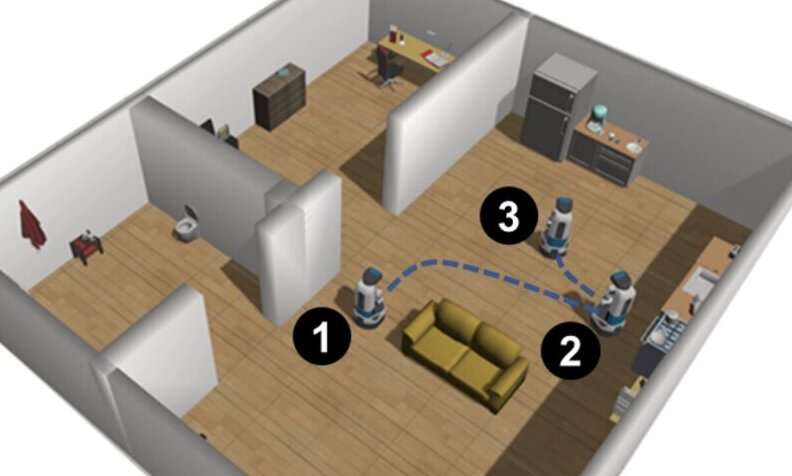
根据密歇根大学的研究,机器人可以通过学习房屋周围不同物体之间的关系来学习如何更快地找到事物。在本文的一个示例中,一种新模型为机器人提供了视觉搜索策略,可以指导机器人在已经看到冰箱的情况下寻找附近的咖啡壶。
这项工作由Chad Jenkins教授和CSE博士领导。学生Zeng Zeng在2020年机器人技术与自动化国际会议上被授予认知机器人技术最佳论文奖。
机器人专家的共同目标是使机器具有在现实环境中导航的能力,例如,我们所生活的无序,不完善的家庭。这些环境可能是混乱的,没有两个完全相同,并且机器人会寻找特定的环境。他们从未见过的物体需要将它们从噪音中剔除。
“能够有效地在环境中搜索对象对于服务机器人自主地执行任务至关重要,” Zeng说。“我们提供了一种实用的方法,使机器人能够在复杂的环境中主动搜索目标对象。”
但是房屋并没有完全混乱。我们围绕不同类型的活动组织空间,通常将某些组的项目存储或安装在彼此附近。厨房通常装有我们的烤箱,冰箱,微波炉和其他小型烹饪用具;卧室将有我们的梳妆台,床和床头柜;等等。
Zeng和Jenkins提出了一种利用这些常见空间关系的方法。他们的“ SLiM”(语义链接图)模型将机器人内存中的某些“地标对象”与其他相关对象以及有关通常如何在空间上定位的数据相关联。他们使用SLiM来考虑目标对象和地标对象的多个功能,以便使机器人对在环境中如何布置事物有更全面的了解。
他们写道:“当被问到可以在哪里找到目标物体时,人类能够给出相对于其他物体的空间关系所表示的假设位置。” “机器人应该能够对物体的位置做出类似的推理。”
该模型不仅是不同对象之间通常有多近的硬编码-从一天到另一天环顾一个房间,您肯定会看到足够的更改以快速使此工作徒劳。相反,SLiM会考虑对象位置的不确定性。
作者在论文中对该项目进行了解释:“以前的作品假定地标物体是静态的,因为它们大多保留在上次观察到的位置。” 为了克服这一限制,研究人员使用了一种因子图(一种表示概率分布的特殊图)来概率地建模不同对象之间的关系。
了解了可能存在的拖曳对象关系后,SLiM指导机器人探索可能包含目标或地标对象的有希望的区域。这种搜索方法基于以前的发现,这些发现表明首先定位地标(间接搜索)比简单地寻找目标(直接搜索)要快。詹金斯(Zenkins)和曾(Zeng)使用的模型是两者的混合体。
图片来源:密歇根大学
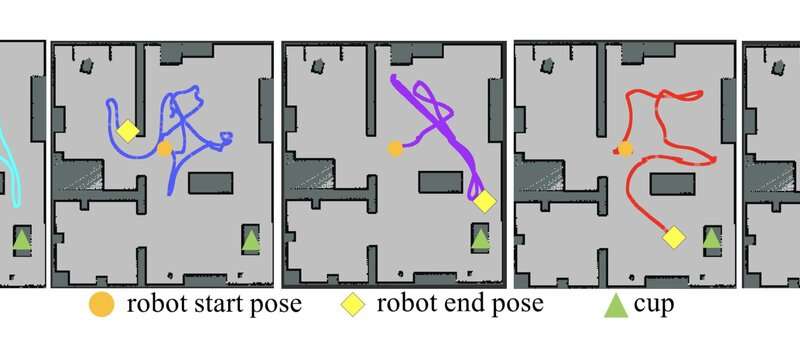
在实验中,该团队在相同的模拟环境中测试了五个不同搜索模型的性能。一种是天真的直接搜索,不了解对象的空间关系,而其余四个则使用SLiM的空间映射结合不同的搜索策略或起始优势:
使用已知的先前位置直接搜索目标,但不考虑对象可能已移动的任何可能性
使用已知的先前位置直接搜索目标,该目标说明了对象可能已移动的可能性
直接搜索,无需事先知道对象的位置
混合搜索,无需事先了解对象的位置。
最后,SLiM与混合搜索相结合成功地在每个测试中找到了路线最直接,搜索时间最少的目标对象。
这项工作发表在论文“用于主动视觉对象搜索的语义链接图”中。