在微观尺度上,拾取,放置,收集和布置物体是一个持续的挑战。纳米技术的进步意味着,我们希望以这些尺寸构建更复杂的东西,但缺少用于移动其组成部分的工具。
现在,宾夕法尼亚大学工程与应用科学学院的一项新研究表明,由磁场远程驱动的简单的微观机器人如何利用毛细作用力来操纵漂浮在油水界面的物体。
该系统在《应用物理快报》上发表的一项研究中得到了证明 。
这项研究由宾夕法尼亚大学工程与化学和生物分子工程学系的Richer和Elizabeth Goodwin教授Kathleen Stebe以及她实验室的研究生Yao Tianyi主持。Stebe实验室的博士后研究员Nicholas Chisholm和Penn Engineering的GRASP实验室的研究科学家Edward Steager对该研究做出了贡献。
宾夕法尼亚大学研究小组的微型机器人是一块磁铁的薄片,直径约三分之一毫米。尽管没有自己的活动部件或传感器,研究人员仍将它们称为机器人,因为它们能够拾取和放置比其还小的物体。
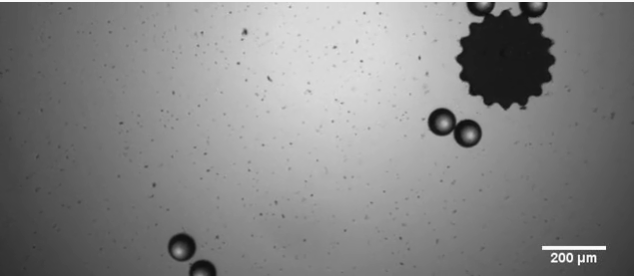
这种能力是这些微型机器人在其中工作的特殊环境的功能:在两种液体之间的界面。在这项研究中,界面位于水和十六烷(一种常见的油)之间。一旦到达那里,机器人就会使该界面的形状变形,从而基本上被毛细管相互作用的不可见“力场”围绕在自身周围。
从树的根部吸取水分到其叶子的毛细作用力在此用于吸取塑料微粒使其与机器人接触,或者使其他已经粘附在其边缘的微粒与机器人接触。
“我们以前曾利用这些毛细作用力来组装东西,但是现在,机器人和粒子更轻了,直径也减小了几个数量级,” Stebe说。“当您下降到微米级时,这意味着由另一种物理原理来控制畸变。收集和组织直径几十微米的物体是一个很大的成就,而不是我们将要手工完成的事情。”

这项研究证明了控制这些微型机器人与它们所要操纵的塑料颗粒之间相互作用的物理机制。
Stebe说:“过去,我们拍摄了静态物体并对其周围进行了变形,然后展示了粒子如何被吸引到这些变形的'高曲率'区域。现在,我们有了一个磁铁,代替了一个静态物体,它可以作为移动失真源。”
奇斯霍尔姆说:“这使事情变得更加复杂。” “当机器人朝着粒子移动时,它会产生一个将粒子推开的流场,因此现在流体动力排斥力和毛细吸引力相互影响。粒子遵循最小能量,这可能意味着向上移动。”
使用方形机器人,研究人员发现,一旦粒子超过变形峰,就会被强烈吸引到角落。这是一个潜在有用的属性,因为机器人可以从各种角度和方向接近目标,并且最终仍将粒子放置在可预测的位置。
“我们已经证明,当您更改机器人的形状时,会更改交互的类型和强度,” Stebe说。“锋利的角落像严酷的死亡一样紧紧抓住粒子,但是当我们柔化角落时,我们可以旋转机器人以释放它们。”
除了柔软的正方形外,研究人员还试验了一个圆形机器人以及一个花形机器人。它们都具有通过旋转就位来精确释放货物的额外优势,其中花形机器人的“花瓣”提供了对货物颗粒位置的最精确控制。
最后,团队展示了一个扩展坞。扩展坞由一块静态的波浪塑料组成,位于接口的上方和下方。这种布置在材料穿过界面的位置提供了一组非常可预测的变形。
Steager说:“我们可以移动这些机器人并收集东西,通过一次捡起一个零件并将它们停靠在我们想要的位置来构建非常复杂的材料。”
由于机器人和粒子之间的交互作用与它们制成的材料无关,因此可能有广泛的应用。
“我们在这项研究中操纵的粒子大约是人类细胞的平均大小或更小,” Yao说,“因此,这种系统可能会在具有磁性微型机器人的单细胞生物学领域中得到应用。在实验的不同阶段移动单个细胞。”
他说:“这些微粒也可能是传感器系统的一部分。” “如果您在界面上安装了机器人和传感器粒子,则可以收集这些粒子,并以极好的空间控制程度将整个装配带到目标区域。在这种情况下,需要非常低浓度的传感器颗粒,并且可以在测试后轻松收回它们。”
未来的工作将涉及开发更大的微型机器人形状和行为库,以操纵其环境中的对象,以及更强大的感测和控制系统,以使机器人具有更大的自主权。