研究人员已经制造出一种完全由较小的机器人组成的新机器人,称为“小机器人”,以解锁潜在的新运动技术的原理。
建造常规机器人通常需要仔细地组合组件,例如电动机,电池,致动器,身体部位,腿和车轮。
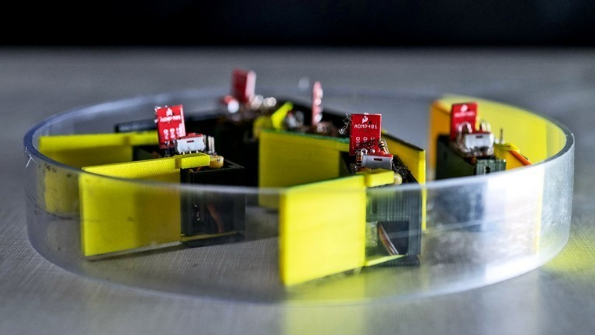
3D打印的smarticle(聪明的活性粒子的缩写)只能做一件事:拍打两只手臂。但是,当研究人员围成一圈限制其中五个智能小脑时,它们开始相互微动,形成了一个称为“超级智能”的机器人物理系统,它可以自行移动。添加光或声音传感器可以使超级智能响应刺激而移动,甚至可以控制得足够好以迷宫导航。
尽管现在还很初级,但由较小的机器人制造机器人的概念(并利用通过合并个体而产生的组能力)可以对非常小的机器人提供基于机械的控制。最终,该小组的新兴行为可以为可能改变形状的小型机器人提供一种新的运动和控制方法。
佐治亚理工学院物理学院教授丹·高德曼(Dan Goldman)说:“这些都是非常基本的机器人,其行为主要由力学和物理定律决定。” “我们不希望对它们全部进行复杂的控制,感测和计算。随着机器人变得越来越小,我们将不得不使用力学和物理原理来控制它们,因为它们将不具备常规控制所需要的计算和感知水平。”
从钉书钉到Smarticles
该研究的基础来自一个不太可能的来源:对建筑钉书钉的研究。通过将这些重型订书钉倒入带有可移动侧面的容器中,前博士学位学生尼克·格列维什(Nick Gravish)(现为圣地亚哥加州大学的一名教员)创造出了能够在研究人员拆除容器壁之后自立的结构。
摇动钉书钉塔最终会导致它们倒塌,但观察结果使人们意识到,简单地缠结机械物体可以创建功能远远超出单个组件的结构。
高德曼说:“一个由其他基本机器人组成的机器人成为了视觉。” “您可以想象制造一个机器人,在其中您可以对其几何参数进行一些微调,然后出现的是定性的新行为。”
在众多之中,有一个
为了探索这一概念,研究生研究助理Will Savoie使用3D打印机创建了电池供电的smarticle,它们具有电机,简单的传感器和有限的计算能力。仅当设备与其他设备交互并被环包围时,它们才能更改其位置。
高德曼解释说:“即使没有单个机器人能够自行移动,但由多个机器人组成的云也可能随着自身的分离而移动,而随着自身的聚集而收缩。” “如果在小型机器人的云团上放一个环,它们就会开始互相踢,而较大的环(我们称之为超级智能机)会随机移动。”
研究人员注意到,如果一个小型机器人停止移动,也许是因为其电池没电了,那组智能棒将开始朝那个停滞的机器人方向移动。研究生罗斯·沃肯汀(Ross Warkentin)了解到,他可以通过向机器人添加光电传感器来控制运动,当强光束照射到其中一个机器人时,光电传感器可以使手臂拍打停止。
高德曼说:“如果将手电筒正确地倾斜,则可以突出显示要使其不活动的机器人,即使没有编程的机器人朝着灯光移动,环也会朝着它或远离它倾斜。” “这允许以非常简单,随机的方式操纵合奏。”
物理学院教授库尔特·维森菲尔德(Kurt Wiesenfeld)和研究生扎克·杰克逊(Zack Jackson)对这些智能小齿轮和超级智能小齿轮的运动进行了建模,以了解环的微动和质量如何影响整体运动。西北大学的研究人员研究了智能粒子之间的相互作用如何提供方向控制。
摇摆不定
“对于许多机器人来说,我们有电流驱动电机,这些电机会在零件上产生力,从而使机器人可靠地共同运动,”机械工程学教授Todd Murphey说。“我们了解到,尽管各个智能粒子通过混乱的相互影响而相互作用,而这些波动都是无法预料的,但是由这些智能粒子组成的整个机器人的移动方式却是可预测的,并且我们可以在软件中加以利用。”
在未来的工作中,高盛设想利用智能物件的简单感应和移动功能进行更复杂的交互。他说:“人们对制造一种由其他机器人组成的群体机器人很感兴趣。” “这些结构可以通过调整几何形状按需重新配置以满足特定需求。”
山姆·斯坦顿说,该项目对美国陆军很感兴趣,因为它可能会导致能够改变其形状,形式和功能的新型机器人系统。他是美国陆军作战能力发展司令部陆军研究实验室的一个成员-陆军研究办公室的复杂动力学和系统项目经理。
“未来的陆军无人系统和系统网络被认为能够改变其形状,形态和功能。例如,某个机器人群有一天可能能够移动到河中,然后自主地形成一种结构来跨越空白。” Stanton说。“ Dan Goldman的研究正在确定物理原理,这些物理原理可能被证明对未来的机器人集体的工程紧急行为以及对系统性能,响应能力,不确定性,弹性和适应性的基本权衡取舍有新的认识。”
该研究发表在《科学机器人》杂志上。